Unidirectional Controller, High current Model
Current Projects!
Model: Unidirectional Controller, High current Model
Priority: Medium-High
Once again, we are working on a new release Motor Control board.
This one is an update for the current 75A and 100A boards with some additional revisions to the driver. While the current model has been good, with some great feedback (and good racing results!) We have had some problems with certain motors running on it (mostly heavy industrial motors with massive windings)
When we designed the current board, we sent it out to people who had problems with the previous revision of the controller for some extended testing. The response was good, and it really looked like we'd solved the all known issues. Fantastic. But throw on a 500w motor with a stall current of 200A, then new problems arise.
So, with this revision, we purchased and borrowed all the motors that were giving the controller grief and did some serious measurement and burn testing! We blew up a lot of boards to finally produce the last revision of this design. Using a heavily modified and beefed up current model controller we have now gotten the board to a point where it runs consistently, regardless of which motor we tested or what type of loads were on the motor!
As an added bonus, we've also got it running much cooler than the current models!
From this point onwards, all the new revisions of this controller will now be modular.
The reasoning behind this is as follows:
- At the moment, the boards are 5oz, which is great for the high current section, but not so great for the low current section. We find that from each batch of controllers we manufacture, as many as one out of every ten boards has heat damage to some of the components on the low current side (where there are large ground planes).
- The traces on the PCB for the 5oz boards are much bigger than they need to be. This is because we have a minimum size for these.
- We can use the driver section by hooking it up to either analogue or digital boards depending on what features the customer wants.
- Repairs will be easier, both for our customers and us.
- Customers will have greater options as to the specifications of their controllers, removing features they won't need or use to reduce cost.
- Easier updating of future models as we only need to focus on half the board!
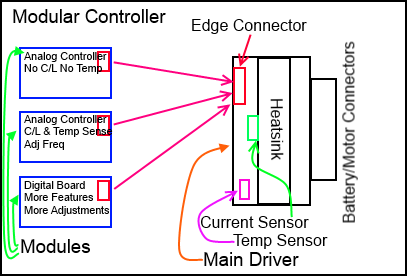
If we split the driver side and the high current section into separate modules, It means we can add more features to the low current side while only adding the parts to the high current side that we will use. For example, as of this update we have a temp sensor on the board and a current sensor. If a customer orders a controller with these options we can just add a driver which is suitable for the customer that has these options build into the board. if a customer requires a simpler controller with none of these features then we don't need to add them. Not every customer needs Current Limiting (C/L) or temperature sensing or whatever other features we've added.
You can see by the diagram below what our current line of thinking is.
Update:
You can see from the images below (a slightly hacked up controller) the first of the new modules.
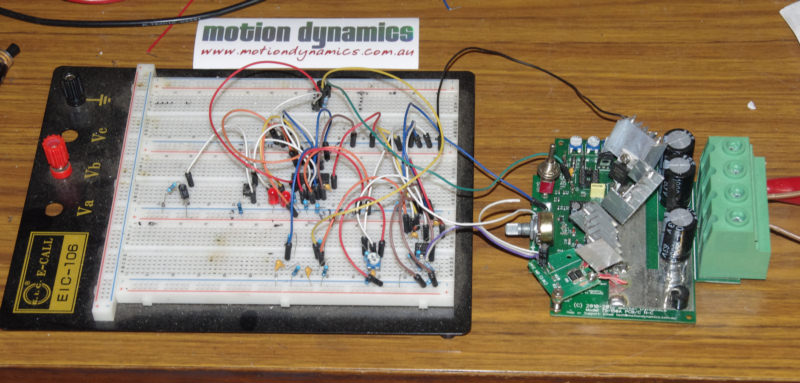
I'm not exactly sure how I'll proceed with these particular modules because there's only slight differences between them. For example, the standard module offers
Low voltage cut-out, mosfet gate drivers (ULTRA fast!) 12-48V input, 0-100% speed regulation, soft start settings, Frequency adjust, Support for 2 types of hall effect controllers (twist grip or foot throttle *both different voltages*)
So pretty much a basic unit with some nice features.
The unit in the picture above offers the same thing, except it also adds two different types of current limiting, which was something that was missing from this unit that it probably should have had.
With the first type of current control, when the current goes over the set current draw, the unit will automatically shut down until a user intervenes and resets the trip via a push button.
The second type, wont shut the unit down, it will just physically limit the current to a pre-set level. This is popular for users who want HHO gas production without draining their batteries.
While both modules are similar, the current limiting unit costs more, but is it worthwhile to make these as 2 separate modules? At the end of the day this will be a premium product, and I guess it really should have these features by default. I don't think I'll add anything more to the module above. As far as features go, that's about as far as i want to go with it. If I start adding more, I think the board will outgrow the case. As it is, I have to fit all the stuff on the breadboard and the hacks to the actual PCB, on the same size pcb as the original one. There's not a lot of space there!
16/10
After some more thought on this, I've decided to move this unit to a new heavy alloy case and actually use the case as the heatsink, with a provision to also have this as a bare bones pcb. I'll design the board so that it will be suitable for both. I've also decided to upgrade the power stage for these high current models and use heavier duty parts.
The power stage on this is pretty good. In all of the units sold, I've only ever seen 2 of them blow up (both from the same person). When I looked into this, I found that the battery the customer was using couldn't supply the current, so the regulator was on a roller coaster ride of highs and lows, which of course caused it to overheat because its not actually heat sinked (usually there's no point because the current draw is so low).
So, is it worth rebuilding the power stages for two failures out of a whole bunch? It wouldn't add much extra time because i've already got the power stages designed for the high current bi-directionals.
09/04/14
Didn't get much chance to update this, but the board is finished and the prototype boards will be here in the next week or two for some extensive testing.
I scrapped the idea of having it as a standalone board and decided it would be best in the case. I made changes to increase the mosfet switching to ultrasonic speeds. This means you won't get that audible whine when the motor is running at low frequencies and made a few other changes too that I've forgotten about.
